弱磁控制的来源
交流电机一般需要变频调速,而变频器作为电机的驱动源,受制于其物理硬件能力,其最大输出电流和电压是由上限的,这也是弱磁控制存在的根本原因。
1. 电流极限约束(Current Limit Constraint)
逆变器内部功率半导体器件的最大允许发热量,以及电机定子绕组的热容量,共同决定了系统能够输出的最大定子电流幅值 Imax。
在 d−q 轴坐标系中,定子电流矢量 is 必须满足:
id2+iq2≤Imax2
在 id−iq 平面上,这是一个以原点 (0,0) 为圆心,Imax 为半径的圆,称为电流极限圆。
2. 电压极限约束(Voltage Limit Constraint)
逆变器能够输出的最大交流相电压基波幅值 Umax 受限于直流母线电压 Udc。
稳态下的 PMSM d−q 轴电压方程如下。为了突出高转速下的主要矛盾,通常忽略微小的定子电阻压降 Rsis。此时稳态电压方程简化为:
ud≈−ωeLqiq
uq≈ωeLdid+ωeψf
其中:
- ωe 为转子电角速度。
- Ld,Lq 为直轴与交轴电感。
- ψf 为永磁体产生的转子磁链。
定子电压矢量 us 必须满足逆变器的电压极限:
ud2+uq2≤Umax2
将近似的 ud 和 uq 代入上式,并移项整理,我们得到电机控制中最著名的电压极限椭圆方程:
(Umax/ωe)2(Ldid+ψf)2+(Umax/ωe)2(Lqiq)2≤1
通过变换,写成更直观的形式:
(id+Ldψf)2+(LdLqiq)2≤(ωeLdUmax)2
这是一个很重要的式子,可以看出:在 id−iq 平面上,这是一个中心点位于 (−Ldψf,0) 的椭圆。
当母线电压 Umax 固定时,随着转速 ωe 的不断升高,这个电压极限椭圆的面积会不断收缩。
弱磁控制的原理
当电机从静止开始加速时(低速区),电压椭圆非常大,足以完全包住电流极限圆。此时系统不受电压限制,我们可以自由寻找能产生最大转矩的电流组合(MTPA的来源)。
基速的定义(Base Speed)
随着转速 ωe 增加,电压椭圆不断收缩。当椭圆收缩到刚好与额定最大电流 Imax 下的 MTPA(最大转矩电流比)工作点相交时,此时的转速被称为基速(ωbase)。这是在不改变控制策略下,电机能达到最高转速的理论边界。如果继续提高转速,逆变器将饱和,无法提供电机所需要的电压(电流),转速就会表现为波动剧烈的振荡曲线,或是持续跌落。
突破基速:引入负向 d 轴电流
当要求转速 ωe>ωbase 时,原先的工作点已经暴露在收缩后的电压椭圆之“外”。如果强行要求逆变器输出该电流,会引发数学上的电压饱和。
如何让工作点重新回到这颗“越来越小的椭圆”内部?
重新审视电压约束方程的直轴项:(Ldid+ψf)2。
因为永磁体磁链 ψf 是固定的正值常数,唯一的数学解就是令 id 为负值(id<0)。
通过注入负的 id,定子绕组产生的去磁磁场抵消了部分永磁体磁场,使得等效的合成磁链变小,进而压低了反电动势(Back-EMF)。这相当于人为地将工作点向左推入了收缩后的电压椭圆内部,从而换取了转速的进一步提升。这就是“弱磁控制”的数学本质。
运行轨迹控制论 (Control Trajectories)
基于上述数学约束,电机的全速域控制本质是在 id−iq 平面上求解约束条件下的最优化问题(最大化转矩 Te):
Te=23pn[ψfiq+(Ld−Lq)idiq]
- 区域 I:恒转矩区(ωe≤ωbase)
- 约束:仅受电流圆限制。
- 策略:沿 MTPA(Maximum Torque Per Ampere) 轨迹运行,追求系统最高效率。
- 区域 II:弱磁区(ωe>ωbase)
- 约束:同时受电流圆与电压椭圆限制。
- 策略:工作点沿着电流极限圆(id2+iq2=Imax2)向左上方滑动。此时 id 不断变负,iq 被迫减小,输出转矩与转速成反比下降,也称恒功率区。
基速与MTPA曲线计算
以某台低速大功率推进 PMSM 为例,其参数为:
| 参数名称 |
符号 |
数值 |
单位 |
补充说明 |
| 电机类型 |
- |
六相 IPMSM |
- |
双Y型(双星形),相移 30∘,中性点隔离 |
| 额定功率 |
PN |
3500 |
kW |
|
| 额定电压 |
UN |
660 |
V |
|
| 额定转速 |
NN |
889 |
RPM |
|
| 极对数 |
pn |
6 |
- |
|
| 定子单相电阻 |
Rs |
0.00094 |
Ω |
|
| 直轴电感 |
Ld |
0.243 |
mH |
|
| 交轴电感 |
Lq |
0.47 |
mH |
|
| 永磁体磁链 |
ψf |
0.88 |
Wb |
|
| 逆变器限流阀值 |
Imax |
2500 |
A |
|
首先,计算其基速和 MTPA 曲线。首先,计算其基速和 MTPA 曲线:
在进行计算前,我们需要明确该系统在物理上的两个极值约束:
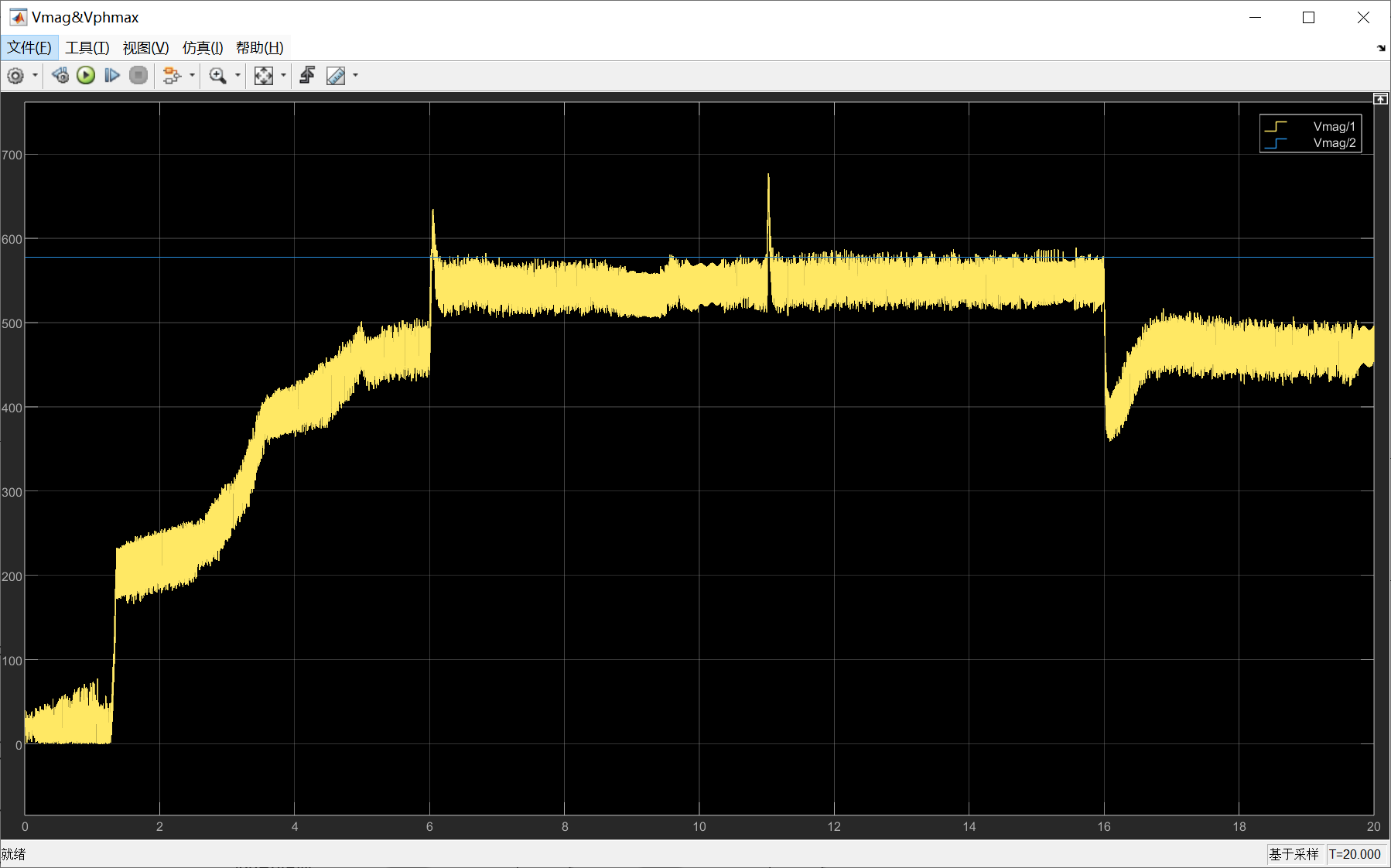
- 最大相电压峰值 (Umax):直流母线电压为 1000 V,则逆变器输出相电压峰值为 $ 1000 / sqrt(3) $,即 577V。
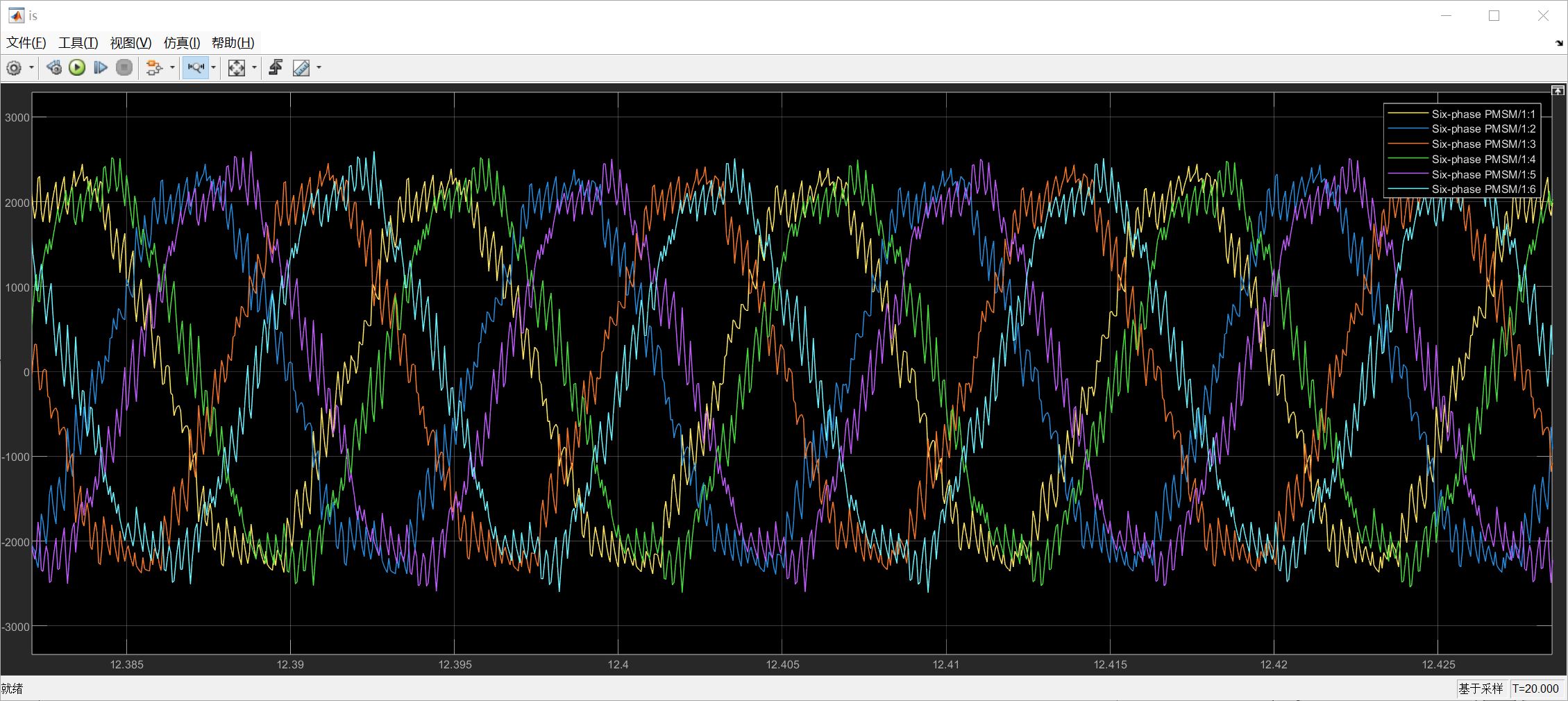
- 最大定子电流峰值 (Imax):满载、额定转速情况下电机每相电流峰值约为2300A,因此逆变器硬件限幅设为 2500A。
MTPA 轨迹方程:
为了在给定的定子电流幅值 Is 下获得最大转矩,定子电流在 d−q 轴的最优分配满足以下关系:
id=4(Lq−Ld)ψf−(4(Lq−Ld)ψf)2+2iq2
理论基速方程:
当在最大电流 Imax 下沿 MTPA 轨迹运行,随着转速升高,电压极限椭圆收缩,直到椭圆边界与该电流点恰好相交时,此时的机械转速即为基速 Nbase:
Umax=ωbase(Ldid_max+ψf)2+(Lqiq_max)2
Nbase=2πpnωbase×60
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
| clear; clc; close all;
Pn = 6;
Ld = 0.243e-3;
Lq = 0.47e-3;
psif = 0.88;
U_max = 577;
I_max = 2500;
Is_vector = linspace(0, I_max, 100);
id_mtpa_table = zeros(1, 100);
iq_mtpa_table = zeros(1, 100);
Te_mtpa_table = zeros(1, 100);
for k = 1:100
Is = Is_vector(k);
if Is == 0
id_mtpa_table(k) = 0;
iq_mtpa_table(k) = 0;
Te_mtpa_table(k) = 0;
continue;
end
term1 = psif / (4 * (Lq - Ld));
id_opt = term1 - sqrt( term1^2 + (Is^2)/2 );
if id_opt < -Is
id_opt = -Is;
end
iq_opt = sqrt(Is^2 - id_opt^2);
id_mtpa_table(k) = id_opt;
iq_mtpa_table(k) = iq_opt;
Te_mtpa_table(k) = 1.5 * Pn * (psif * iq_opt + (Ld - Lq) * id_opt * iq_opt);
end
figure;
plot(Is_vector, id_mtpa_table, 'b-', 'LineWidth', 2); hold on;
plot(Is_vector, iq_mtpa_table, 'r-', 'LineWidth', 2);
grid on;
xlabel('速度环输出电流指令 Is (A)');
ylabel('d-q 轴电流分量 (A)');
title('MTPA 轨迹曲线');
legend('i_d^* (MTPA)', 'i_q^* (MTPA)');
disp('✅ MTPA 表格已生成。变量: Is_vector, id_mtpa_table, iq_mtpa_table 准备完毕。');
id_max = id_mtpa_table(end);
iq_max = iq_mtpa_table(end);
omega_base = U_max / sqrt( (Ld * id_max + psif)^2 + (Lq * iq_max)^2 );
N_base = (omega_base * 60) / (2 * pi * Pn);
fprintf('\n=== 基速计算结果 ===\n');
fprintf('在极限电流 %d A 下对应的 MTPA 指令:\n', I_max);
fprintf('id = %.2f A, iq = %.2f A\n', id_max, iq_max);
fprintf('理论基准电角速度: %.2f rad/s\n', omega_base);
fprintf('理论基准机械转速: %.2f RPM\n', N_base);
|
计算得到:
1
2
3
4
5
| === 基速计算结果 ===
在极限电流 2500 A 下对应的 MTPA 指令:
id = -1046.84 A, iq = 2270.27 A
理论基准电角速度: 466.49 rad/s
理论基准机械转速: 742.43 RPM
|
控制器
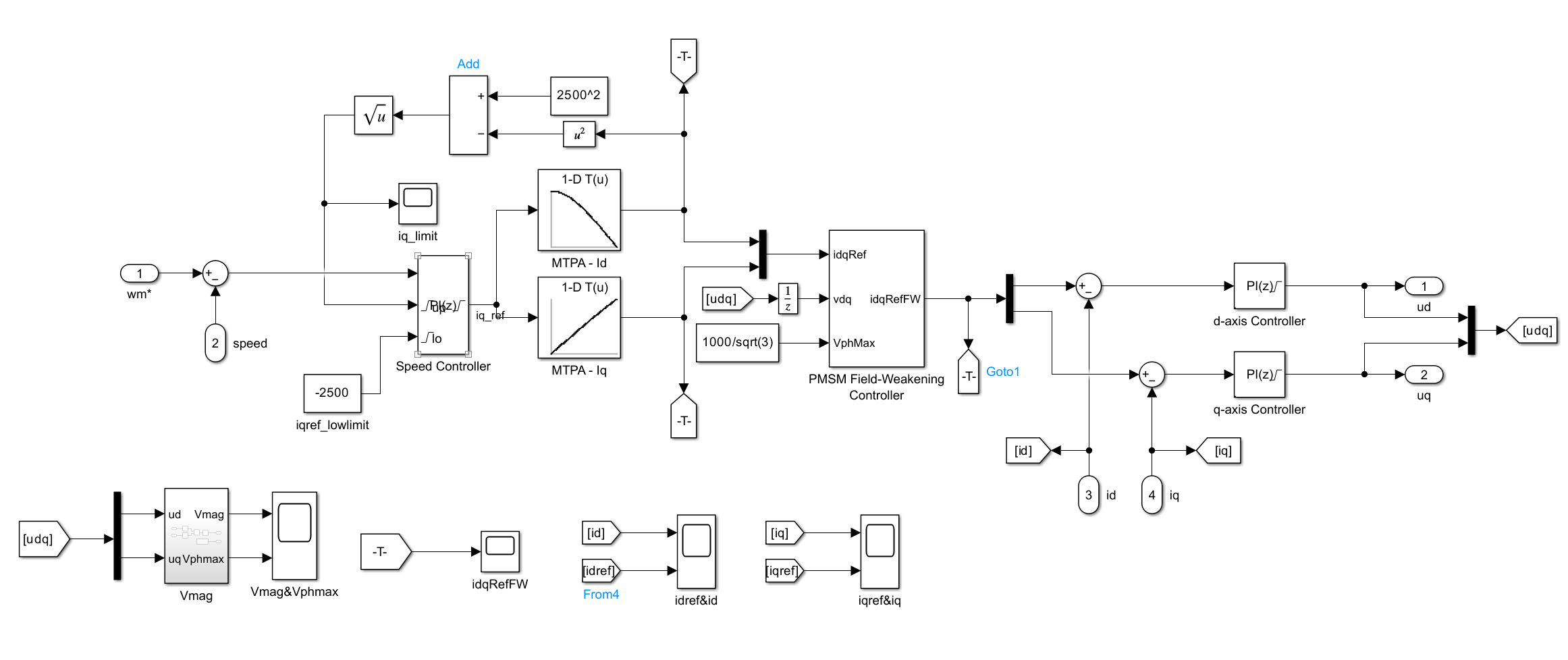
速度外环与动态限幅模块 (Speed Loop & Dynamic Saturation)
位于模型最左侧,是整个控制系统的大脑,决定了电机要输出多少动力。
核心部件
- Sum 模块:计算目标转速
wm* 与实际转速 speed 的误差。
- Speed Controller (PI 控制器):带有外部饱和上限(External Upper Limit)输入的 PI 调节器。
- 动态限幅计算逻辑:由平方模块(u2)、加减模块(25002−u2)和开方模块(u)组成。
工作原理与数学逻辑
速度环 PI 的原始任务是根据转速误差输出总电流指令幅值 Is(模型中线标为 iq_ref)。
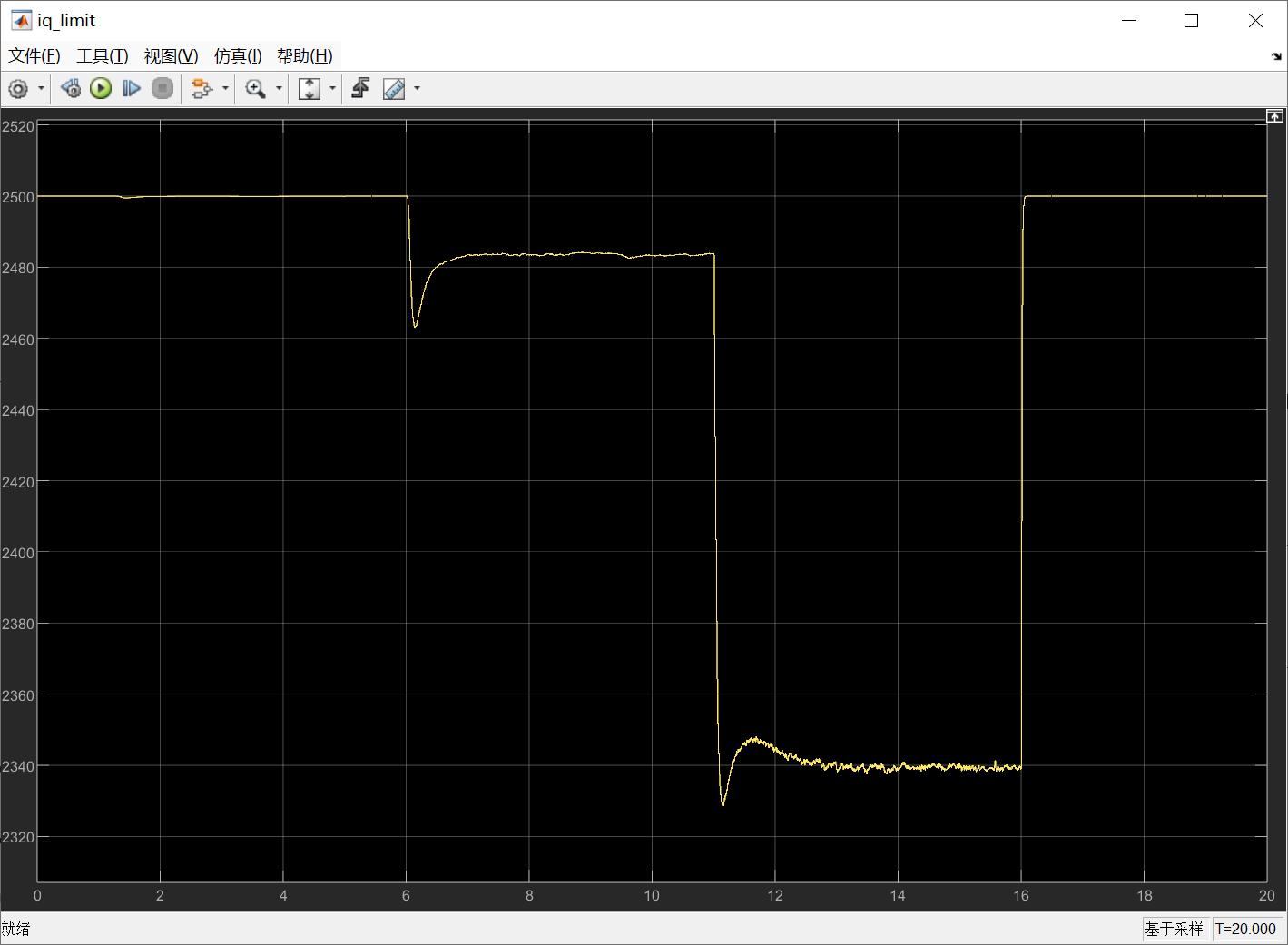
本模块最精妙的设计在于动态限幅。它实时采集弱磁控制器最终输出的 d 轴电流指令 id_ref(通过标签 -T- 引入),并计算剩余的 q 轴电流可用空间:
iq_limit=Imax2−id_ref2=25002−id_ref2
计算结果被送入 PI 控制器的上限限幅端口。下限则被固定在 -2500(iqref_lowlimit)。
效果
- 消除资源争夺:在深弱磁区,弱磁环需要极大的负 id 来压制电压。如果速度环不知道 id 已经占用了大量额度,仍按 2500A 去要求 iq,总电流就会突破物理极限,引发非线性震荡。
- 防积分饱和 (Anti-windup):通过将 iq_limit 动态喂给 PI 控制器,一旦电压受限导致 id 激增,速度环的 PI 积分器会立刻感知到上限的收缩并停止积分,彻底消除了满载工况下的“拉风箱”式失控震荡。
MTPA 查表解耦模块 (MTPA Lookup Tables)
位于模型中左侧,负责将速度环请求的“总力气”最优地分配给 d 轴和 q 轴。
核心部件
- 1-D T(u)
MTPA - Id:一维查表模块,输入总电流幅值,输出最优负向 id。
- 1-D T(u)
MTPA - Iq:一维查表模块,输入总电流幅值,输出最优正向 iq。
工作原理与数学逻辑
IPMSM 具有磁阻转矩(因为 Lq>Ld)。为了在定子电流发热最小的前提下输出最大转矩,必须满足电磁转矩对方程求极值的约束:
id=4(Lq−Ld)ψf−(4(Lq−Ld)ψf)2+2Is2
模型通过离线计算好这条数学曲线,将输入 Is 瞬间映射为一对 [id, iq] 矢量,并打包成 idqRef。
效果
- 执行效率极高:在线计算根号和非线性方程会极大消耗 DSP 算力,查表法(LUT)在工业软件中最稳定、最快。
- 榨干电机效能:在基速以下运行时,该模块确保电机全程利用磁阻转矩,用最小的电流(最高效率)输出所需推力。
弱磁控制器与代数环斩断 (Field-Weakening Controller & Algebraic Loop Break)
位于模型正中央,是系统突破转速物理天花板的核心枢纽。
核心部件
- PMSM Field-Weakening Controller:弱磁核心算法模块。
- Constant
1000/sqrt(3):设定逆变器最大相电压阈值 VphMax≈577.3V。
1/z (Unit Delay):极其关键的单位延迟模块,串联在电压反馈通路 [udq] 上。
工作原理与数学逻辑
弱磁块就像一个“监工”。
- 在低速区:反馈回来的电压矢量模长 ud2+uq2 小于 577.3V。监工不干预,直接把 MTPA 传来的
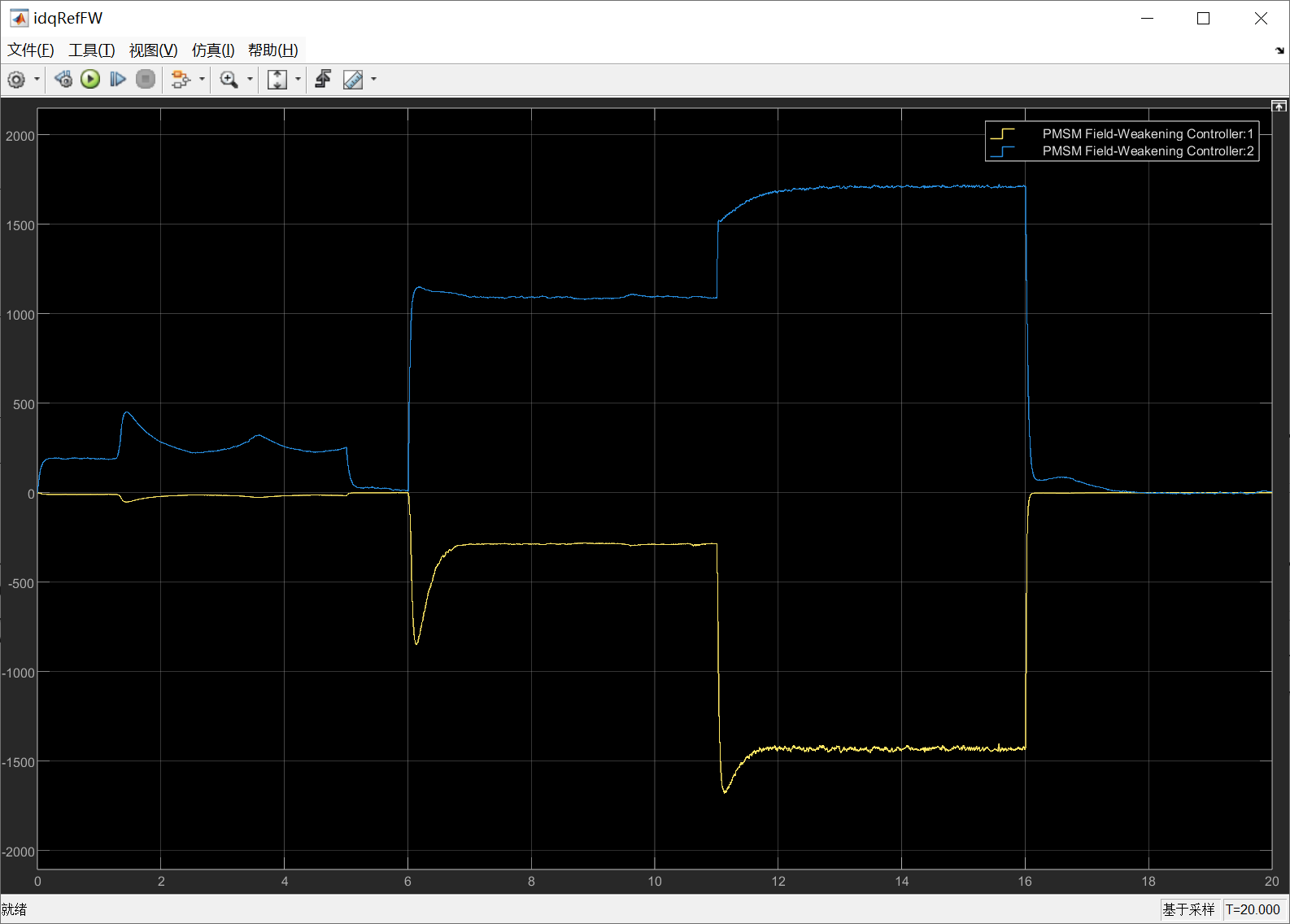
idqRef 原封不动地通过,输出为 idqRefFW。
- 在高速深弱磁区:当反馈电压即将突破 577.3V 时,弱磁模块内部的 PI 调节器开始介入(可以根据模块内部的 Modulation Index Threshold 设定),强制在 MTPA 的基础上叠加更深的负 id(即以磁克磁),同时压低 iq 以保护总电流不超过极限。
效果
- Unit Delay 的救命作用:电流环输出的 udq 如果瞬间无延迟地直接反馈给弱磁环,会在 Simulink 中形成无代数解的死循环(代数环),导致电压波形不稳定。加了
1/z 后,强制用上一控制周期的电压来推算当前的弱磁量,符合物理真实情况,使系统数值求解极其稳定。
- 平滑过渡:使得电机能够从 MTPA 区无缝滑入弱磁区,在电压撞墙时依然能保持高转速巡航。
电流内环模块 (Current Inner Loop)
位于模型最右侧,负责精准、快速地执行经过 MTPA 和弱磁裁定后的最终电流指令。
核心部件
- Sum 模块:分别计算 d 轴和 q 轴的电流跟踪误差(iref−iactual)。
- d-axis / q-axis Controller (PI 控制器):两个高带宽的 PI 调节器。
工作原理与数学逻辑
这是标准的基于 d−q 旋转坐标系的矢量控制(FOC)内环。PI 控制器根据电流误差,计算出应该施加在电机端部的交直轴电压 ud 和 uq:
ud=Kp(id_ref−id)+Ki∫(id_ref−id)dt
uq=Kp(iq_ref−iq)+Ki∫(iq_ref−iq)dt
这两个电压信号打包为 [udq],随后将送入 SVPWM 调制模块生成脉冲驱动逆变器桥臂。
效果
- 消除电磁惯性:电机绕组具有极大的电感特性,直接给电压很难控制电流。电流内环通过高增益闭环,强制实际定子电流紧紧“咬”住指令波形,是整个推进系统具备高动态响应(突加负载不飞车)的基础保障。
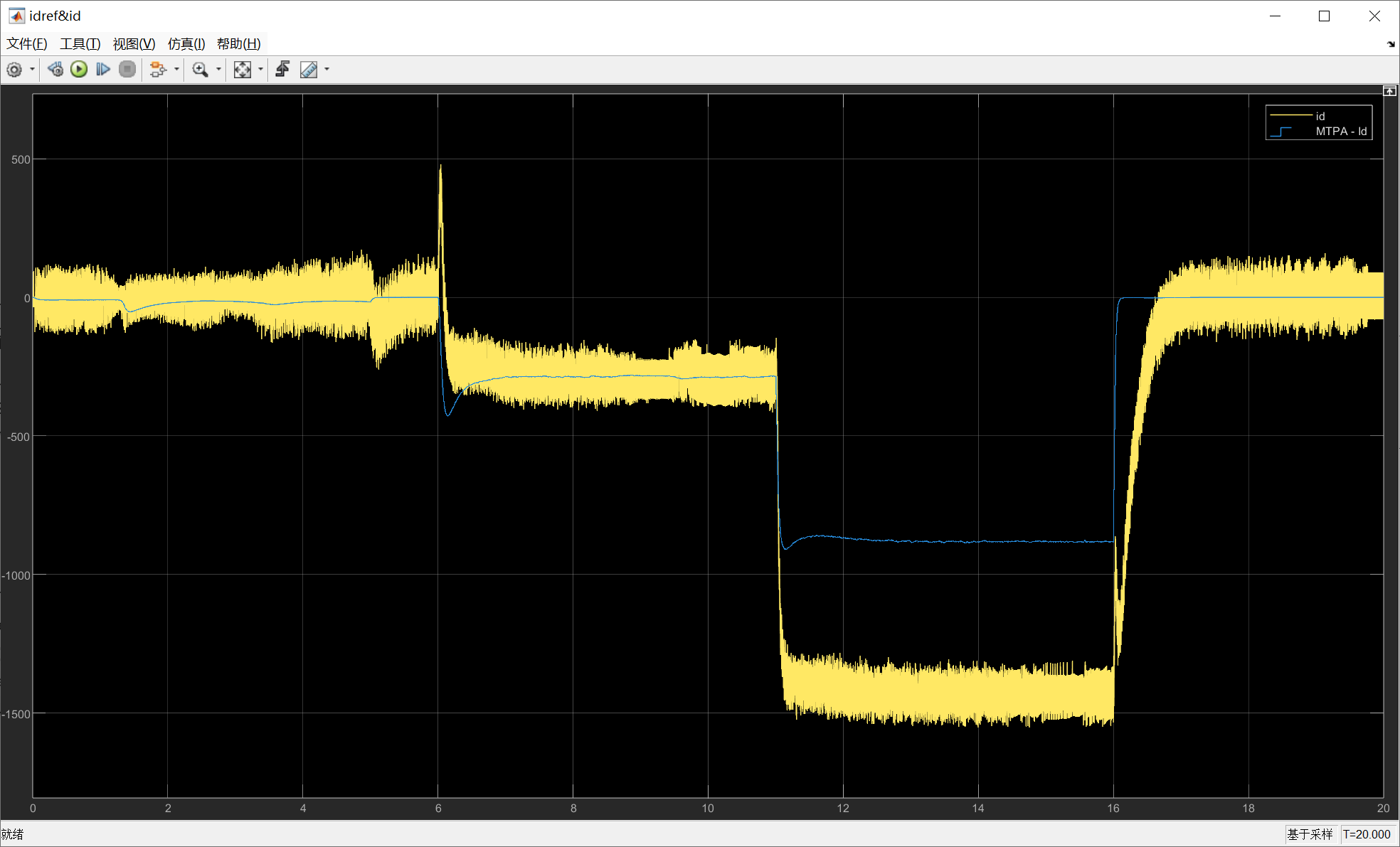
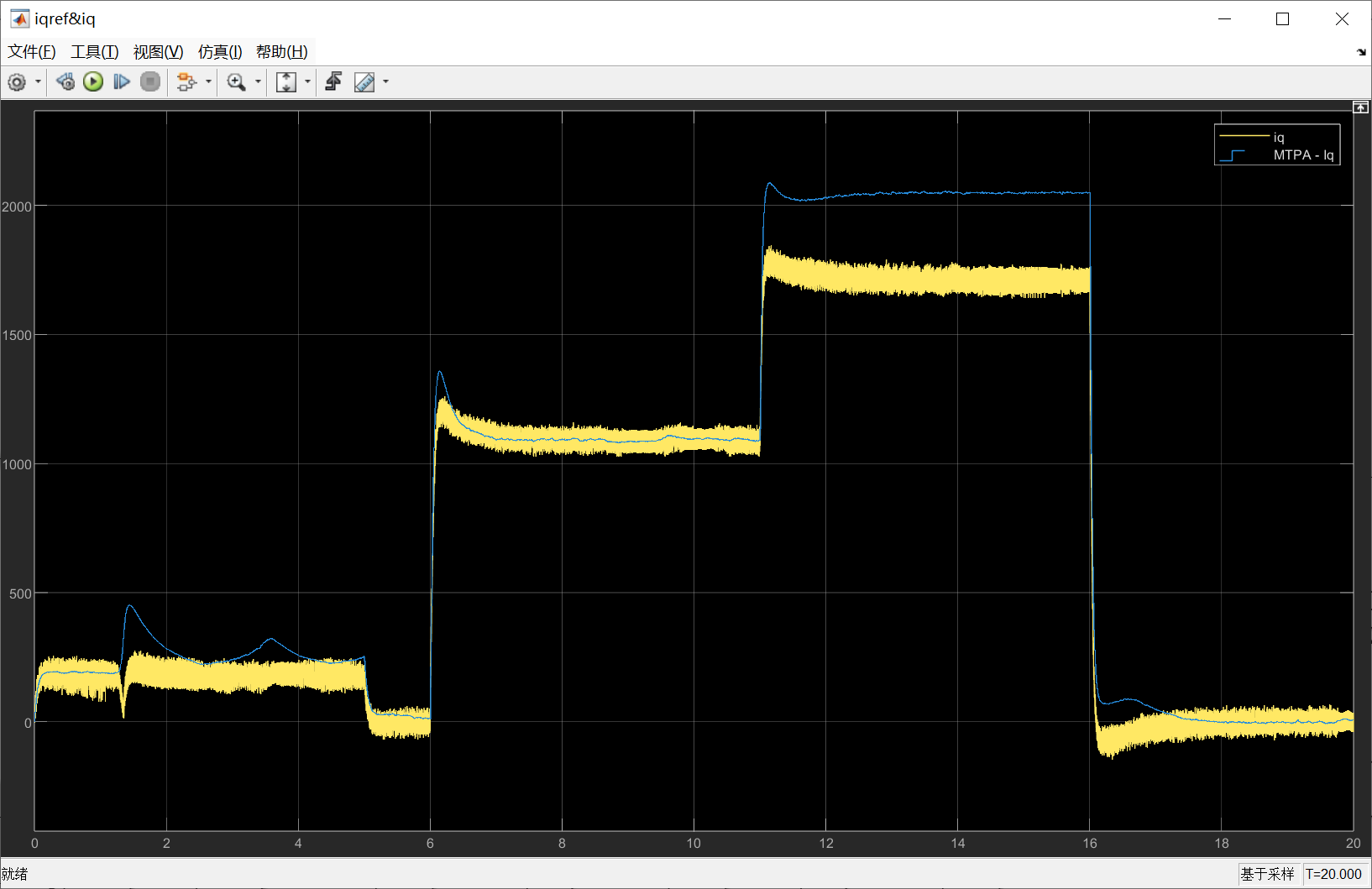
验证
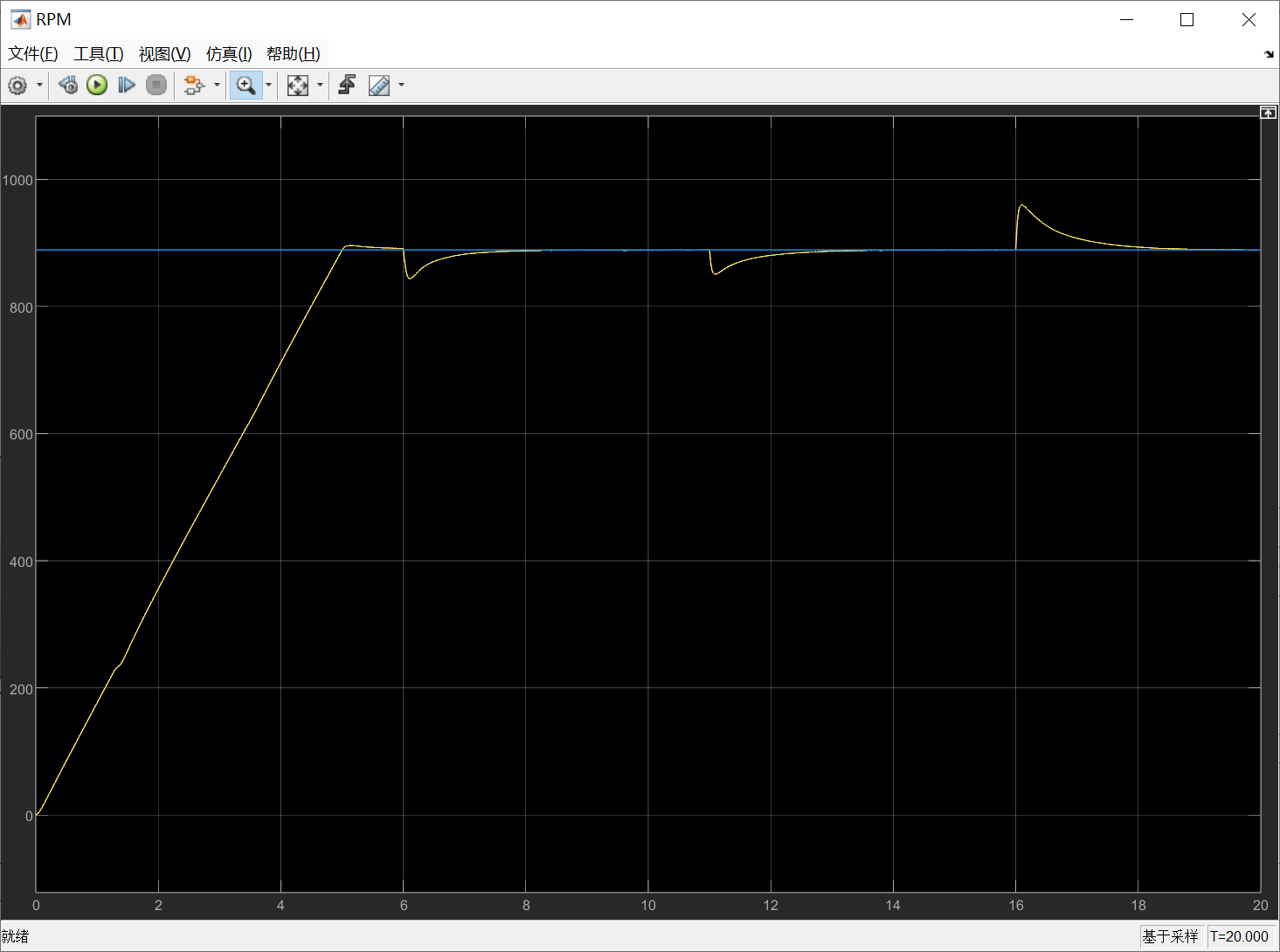
为了对电机进行测试,在simulink中进行了以下操作。仿真开始后,
- 在 5 s 内施加转速给定值至额定转速 889 rpm
- 在第 6 s 突加至 50 % 额定转矩
- 在第 11 s 突加至 100 % 额定转矩(即另加 50 % 的额定转矩)