引言
十二相同步发电机在定转子分解方面的步骤和三相同步发电机基本一致。如果单独考虑与定子直轴和交轴绕组想独立的零轴绕组,则在考虑d、q、f、D、Q五个绕组的电磁过渡过程及转子机械过渡过程时,会面临高阶模型的求解难题。实际工程中通常对同步电机的数学模型作不同程度的简化。
参数定义
| 符号 |
含义 |
单位 |
| ud |
定子d轴电压 |
V(伏) |
| uq |
定子q轴电压 |
V(伏) |
| id |
定子d轴电流 |
A(安) |
| iq |
定子q轴电流 |
A(安) |
| ra |
定子各相绕组电阻 |
Ω(欧姆) |
| Xd |
直轴同步电抗 |
Ω(欧姆) |
| Xq |
交轴同步电抗 |
Ω(欧姆) |
| Xd′ |
直轴暂态电抗 |
Ω(欧姆) |
| Xad |
直轴电枢反应电抗 |
Ω(欧姆) |
| Xaq |
交轴电枢反应电抗 |
Ω(欧姆) |
| Xf |
励磁绕组自感电抗 |
Ω(欧姆) |
| rf |
励磁绕组电阻 |
Ω(欧姆) |
| Eq |
交轴空载电动势(稳态) |
V(伏) |
| Eq′ |
交轴暂态电动势(状态变量) |
V(伏) |
| Ef |
等效励磁电动势(励磁系统输入) |
V(伏) |
| Td0′ |
d轴开路暂态时间常数 |
s(秒) |
| TJ |
转子转动惯量对应时间常数 |
s(秒) |
| Tm |
原动机提供的机械转矩 |
Nm(牛·米) |
| Te |
发电机电磁转矩 |
Nm(牛·米) |
| ω |
电机相对同步角速度(机械量) |
p.u.(标幺值) |
| δ |
电机转子与同步旋转坐标系的夹角 |
rad(弧度) |
| Φd |
d轴磁链 |
Wb(韦伯) |
| Φq |
q轴磁链 |
Wb(韦伯) |
| Φf |
励磁绕组磁链 |
Wb(韦伯) |
| p |
微分算符(p=dtd) |
s⁻¹(每秒) |
前置条件
假定:
- 忽略定子直轴、交轴绕组的暂态过程,即定子电压方程中取pΦd=pΦq=0
- 在定子电压方程中取ω≈1(p.u.)。通常在速度变化不大的过渡过程中,该近似引起的误差较小
- 忽略D、Q和等效交轴稳定绕组,其作用可在转子运动方程补入阻尼项来近似
推导
引入实用变量
为了消去转子励磁绕组的变量if、uf和Φf,引入以下三个定子侧等效实用变量:
- 定子励磁电动势Ef:
Ef=Xadrfuf
- 交轴空载电动势Eq
Eq=Xadif
- 交轴瞬变电动势Eq′
Eq′=XfXadΦf
也就是说Ef、Eq、Eq′分别对应uf、if、Φf。
稳态时,有if=uf/rf,所以(下标0表示稳态值):
Ef0=Eq0
由Park方程,稳态时
uq0=Eq0−Xdid0−raiq0
从而
Ef0=Eq0=uq0+Xdid0+raiq0
根据上式可由稳态定子电量计算Ef0 和 Eq0。
根据Eq′=XfXadΦf,电机交轴瞬变电动势Eq′和励磁绕组磁链成正比,由于暂态过程中磁链无法突变,假设扰动发生在t=0,则
Eq′∣t=0=Eq′∣t=0′
可根据稳态值来确定Eq′在扰动发生时的初值,而由Park方程可知
Φf0=−Xadid0+Xfif0
等式两侧同乘Xad/Xf,可得
Eq0′=XfXadΦf0=−XfXad2id0+Xadif0
根据Ef0=Eq0=uq0+Xdid0+raiq0,有
Xadif0=Eq0=uq0+Xdid0+raiq0
因为
Xd′=Xd−XfXad2
代入Eq0′=XfXadΦf0=−XfXad2id0+Xadif0,可得
Eq0′=uq0+Xd′id0+raiq0
该式可用于计算Eq′在扰动时的初值,Eq0′反映了瞬变初的交轴暂态电动势。
导出思路
思路如下:
- 对于Park方程,在忽略D、Q绕组(将相应方程及变量删去)后,尚有以下变量:udqf、idqf、Φdqf及ω、δ、Tm。假设uf和Tm为已知量(分别为励磁系统及原动机输出量),则有10个未知量。对应有直轴、交轴和励磁3个绕组的电压方程、磁链方程和2个转子运动方程,共计8个方程。若和直轴、交轴网络方程联立,则变量数和方程数平衡,可以求解。
- 由Park方程推导三阶实用模型时,应保留定子变量udq和idq,而转子变量uf、if和Φf分别用Ef、Eq和Eq′替代,然后再用3个磁链方程消去Φd、Φq及if(或Eq),从而在最终同步电机模型中保留udq、idq、Ef、Eq′及ω、δ、Tm等变量,其中Eq′、ω、δ为状态量,电机方程由3个电压方程和2个转子运动方程组成。当Ef和Tm已知时(对外表现为励磁系统和原动机系统输入),可联立求解方程。
变量转换及消去
先消去Φd、Φq及if(Eq)所用表达式,将其用保留变量的函数来表示。
已知直轴磁链方程为:
Φd=−Xdid+Xadif
Φf=−Xadid+Xfif
将上式中的第二个式子等式两侧同乘Xad/Xf,有
Eq′=−XfXad2id+Xadif
因为
Xd′=Xd−XfXad2
则上上个式子可表示为
Eq′=Φd+Xd′id
或
Φd=Eq′−Xd′id
上式即可用来消去Φd。
由Φd=−Xdid+Xadif和Eq=Xadif,可得
Φd=Eq−Xdid
将Φd=Eq′−Xd′id代入上式,可得
Eq′−Xd′id=Eq−Xdid
整理,上式即为
Eq=Eq′+(Xd−Xd′)id
该式可用于消去if(Eq)。该式同时也是忽略D、Q绕组时用于表征Eq和Eq′之间的一个重要关系。
注意:计及D、Q绕组暂态时,此关系不成立。
q轴磁链方程为:
Φq=−Xqiq
该式可直接用来消去Φq。
至此,消去Φd、Φq和if(Eq)的表达式均已得到,分别为:
Φd=Eq−Xdid
Eq=Eq′+(Xd−Xd′)id
Φq=−Xqiq
导出三阶模型
对原始电压方程,令pΦd=pΦq=0,ω≈1,再将Φd=Eq−Xdid和Φq=−Xqiq代入,得
{ud=Xqiq−raiduq=Eq′−Xd′id−raiq
对于励磁绕组电压方程,将其改写为
pΦf=uf−rfif
上式两侧同乘
XfXad×rfXf
由于Td0′=Xf/rf,再由Ef、Eq和Eq′的定义,可得
Td0′pEq′=Ef−Eq
将Eq=Eq′+(Xd−Xd′)id代入上式,消去Eq,有
Td0′pEq′=Ef−Eq′−(Xd−Xd′)id
上式即为转子励磁绕组的暂态方程。
另对转子运动方程改造如下:
根据
TJdtdω=Tm−Te=Tm−[Eq′iq−(Xd′−Xq)idiq]
消去Φd和Φq,得到
TJdtdω=Tm−Te=Tm−[Eq′iq−(Xd′−Xq)idiq]
另一运动方程不变,为
dtdδ=ω−1
至此,以下四个式子构成了同步发电机的实用三阶模型:
{ud=Xqiq−raiduq=Eq′−Xd′id−raiq
Td0′pEq′=Ef−Eq′−(Xd−Xd′)id
TJdtdω=Tm−Te=Tm−[Eq′iq−(Xd′−Xq)idiq]
dtdδ=ω−1
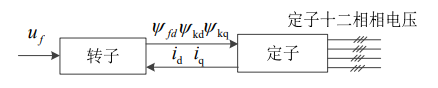
推广至十二相同步发电机
十二相同步发电机的定子绕组在一定条件下可视为4个完全解耦的三相同步发电机定子绕组,每套Y绕组之间位移15°电角度。因此三相同步发电机模型和十二相同步发电机模型只在Park变换上有绕组数量和位移的差别,对于定转子分解的计算和分析则完全一致。
对于和Eq,可以很简单的推导如下。首先有:
Td0′pEq′=Ef−Eq′−(Xd−Xd′)id
移项为求解Eq′形式,并Laplace变换至s域:
Eq′=Td0′s+11(Ef−(Xd−Xd′)id)
对于转子运动方程,若原动机为柴油机,在考虑机组摩擦转矩阻尼系数λf的情况下,有
Tm−Te−λfω=TJdtdω
ω=TJs+λfTm−Te
Simulink模型
对于Simulink模型,机端电压ud和uq为结果量而非驱动量,实际的驱动量为发电机感应电动势ed和eq:
ed=pΦd−ωΦq
eq=pΦq+ωΦd
三阶实用模型中通常忽略定子暂态,即令pΦd=pΦq=0,于是有
ed≈−ωΦq
eq≈ωΦd
我们已经在之前的推导中得到Φd和Φq的实用参数表达式
Φd=Eq−Xdid
Φq=−Xqiq
代入Eq=Xadif,有
Φd=Xadif−Xdid
联立,有
ed=ωXqiq
eq=ωXadif−ωXdid
上式可用于代数计算某一时刻的ed和eq,但无法反应系统特征。要获取系统特征,改写为以下式子:
ed=ωXqiq
eq=ωEq′−ωXd′id=ωTd0′s+11(Ef−(Xd−Xd′)id)−ωXd′id
励磁系统简化模型
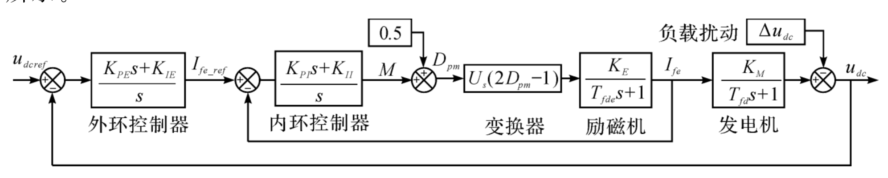
对于励磁系统而言,不考虑饱和、剩磁和转速变化的影响时,主励磁机可简化为一阶惯性环节:
GE(s)=Tfdes+1KE
式中,Tfde为励磁机励磁绕组时间常数,KE为励磁机放大倍数。
事实上,对于电力系统建模而言,励磁机的作用仅仅只是根据输入和参考量,来计算得到合适的Ef,因此无需对励磁机本身做非常精确的建模。任何一个电气量(比如Xfd)的细微差别都可能被控制器抵消。在这种情况下,仅需保证励磁系统结构和输出量正确即可,无需过分关注部分元器件的精确参数。
定转子分解模型
转子模型
计及转子稳定绕组的情况下,考虑转子磁链方程为
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧pψfdpψkdpψfqpψkq=ωb(ufd−rfdifd)=ωb(−rkdikd)=ωb(−rfqifq)=ωb(−rkqikq)
式中ωb为转速基值。标幺化时时间基值为tB=1/ωB,因此对时间的微分实际上为
p=dt∗d=ωBtd
由转子磁链方程
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧ψfd=ψad+ψfdlψkd=ψad+ψkdlψfq=ψaq+ψfqlψkq=ψaq+ψkql
式中ψmd和ψmq为直轴、交轴激磁磁链。
上式可进一步化为适合计算的形式:
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧ifd=xfdl−1(ψfd−ψad)ikd=xkdl−1(ψkd−ψad)ifq=xfql−1(ψfq−ψaq)ikq=xkql−1(ψkq−ψaq)
根据磁路基尔霍夫定理,直轴、交轴激磁磁链不计饱和时的计算公式为
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧xad′ψad=−Σidi+xfdlψfd+xkdlψkdxaq′ψaq=−Σiqi+xfqlψfq+xkqlψkq
整理有
⎩⎪⎪⎪⎨⎪⎪⎪⎧ψad=xad′(−(id1+id2+id3+id4)+xfdlψfd+xkdlψkd)ψaq=xaq′(−(iq1+iq2+iq3+iq4)+xfqlψfq+xkqlψkq)
式中xad′和xaq′由等效感抗合成得来:
{xad′=xfdl//xkdl//xadxaq′=xfql//xkql//xaq
上面两个式子可以求解得到转子激磁磁链。
定子模型
直轴部分
首先引入实用变量xd′′:
xd′′=xls+xad//xfdl//xkdl
并且
xfd=xfdl+xad,xkd=xkdl+xad
定义q轴超瞬变电动势Eq′′,其物理意义时当fd绕组磁链为ψfd,kd绕组磁链为ψkd时,同步转速下的定子q轴开路电动势。
根据叠加原理,同步转速下时,有:
ψd=xfdl+xad//xkdlψfd×xad+xkdlxkdl×xad+xkdl+xad//xfdlψkd×xad+xfdlxfdl×xad=xfdxkd−xad2xad(xkdlψfd+xfdlψkd)
同步转速下电机定子开路时,Eq′′的值即等于ψd为
Eq′′=xfdxkd−xad2xad(xkdlψfd+xfdlψkd)
根据同步发电机五阶实用模型,d轴磁链表达式为
ψd=Eq′′−Xd′′id=xfdxkd−xad2xad(xkdlψfd+xfdlψkd)−Xd′′id
考虑将上式等号右侧的分式项转换成带漏抗的形式。展开分母,有
xfd⋅xkd−xad2=(xfdl+xad)(xkdl+xad)−xad2=xfdlxkdl+xfdlxad+xadxkdl+xad2−xad2=xfdlxkdl+xfdlxad+xadxkdl
因此原分式可以改写为
xfd⋅xkd−xad2xad=xfdlxkdl+xadxkdl+xadxfdlxad
因此原式子等号右侧可以改写为:
xfdlxkdl+xadxkdl+xadxfdlxad⋅xkdl⋅ψfd+xfdlxkdl+xadxkdl+xadxfdlxad⋅xfdl⋅ψkd
我们恰好有
xad′=xad∥xfdl∥xkdl=xfdlxkdl+xadxkdl+xadxfdlxad⋅xfdl⋅xkdl
显然能够得到以下关系式:
xfd⋅xkd−xad2xad⋅xkdl=xfdlxkdl+xadxkdl+xadxfdlxad⋅xfdl⋅xkdl=xfdlxad′⋅xfdl1xfd⋅xkd−xad2xad⋅xfdl=xfdlxkdl+xadxkdl+xadxfdlxad⋅xfdl⋅xkdl=xfdlxad′⋅xkdl1
因此原式子可以改写为
ψd=−xd′′id+xfdlxad′ψfd+xkdlxad′ψkd
交轴部分
同理,可得到
ψq=−xq′′iq+xfqlxaq′ψfq+xkqlxaq′ψkq
最终形式
联立直轴和交轴方程,得到
ψd=−xd′′id+xfdlxad′ψfd+xkdlxad′ψkdψq=−xq′′iq+xfqlxaq′ψfq+xkqlxaq′ψkq
其中
xd′′=xls+xad//xfdl//xkdl=xls+xad′xq′′=xls+xaq//xfql//xkql=xls+xaq′xad′=xad//xfdl//xkdlxaq′=xaq//xfql//xkql
已知电压方程为
ud=pψd−ωψq−raiduq=pψq+ωψd−raiq
将磁链方程代入到电压方程,可得
ud=uq=−(xd′′p+ra)id+ωxq′′iq+xfdlxad′pψfd+xkdlxad′pψkd−ωxfqlxaq′ψfq−ωxkqlxaq′ψkq−(xq′′p+ra)iq−ωxd′′id+xfqlxaq′pψfq+xkqlxaq′pψkq+ωxfdlxad′ψfd+ωxkdlxad′ψkd
将其改写为更简洁的形式:
ud=−xd′′pid+ωxq′′iq+(xfdlxad′pψfd+xkdlxad′pψkd−ωxfqlxaq′ψfq−ωxkqlxaq′ψkq)−raiduq=−xq′′piq−ωxd′′id+(xfqlxaq′pψfq+xkqlxaq′pψkq+ωxfdlxad′ψfd+ωxkdlxad′ψkd)−raiq
括号内的式子实际上就是ed′′和eq′′:
ed′′=xfdlxad′pψfd+xkdlxad′pψkd−ωxfqlxaq′ψfq−ωxkqlxaq′ψkqeq′′=xfqlxaq′pψfq+xkqlxaq′pψkq+ωxfdlxad′ψfd+ωxkdlxad′ψkd
定子电压方程可简化为
ud=ed′′−xd′′pid+ωxq′′iq−raiduq=eq′′−xq′′piq−ωxd′′id−raiq
等效三相电抗对称(xd′′=xq′′)的前提下,对上式作Park逆变换,有
⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧ua=ea′′−Ld′′dtdia−raiaub=eb′′−Ld′′dtdib−raibuc=ec′′−Ld′′dtdic−raic
上式即为标准电动势-机端电压表达式。Ld′′和ra可用Powergui电感和电阻模拟。
等式成立需要满足条件xd′′=xq′′,通常情况下二者并不严格相等,为了解决此问题,文献[40]提出了在q轴转子侧加一虚拟阻尼电阻的方法,从而令xd′′=xq′′,并且通过仿真验证了新添加的虚拟阻尼电阻并不会显著影响转子暂态性能。
励磁控制器参数设计
不考虑饱和、剩磁和转速变化的情况下,主励磁机可简化为一阶惯性环节
GE(s)=Tfdes+1KE
式中Tfde为励磁机时间常数。
励磁机内环(励磁电流内环)控制器传递函数为
GI(s)=KPI+sKII=sKPIs+KII
直流电压外环控制器传递函数为
GE(s)=KPE+sKIE=sKPEs+KIE
励磁机励磁内环控制系统开环传递函数为
GK(s)=s2KII(KIIKPIs+1)Tfdes+11
为简化设计,可选择内环控制器PI参数来对消励磁机惯性环节以降低系统阶数,即
KIIKPI=Tfde=0.06s